
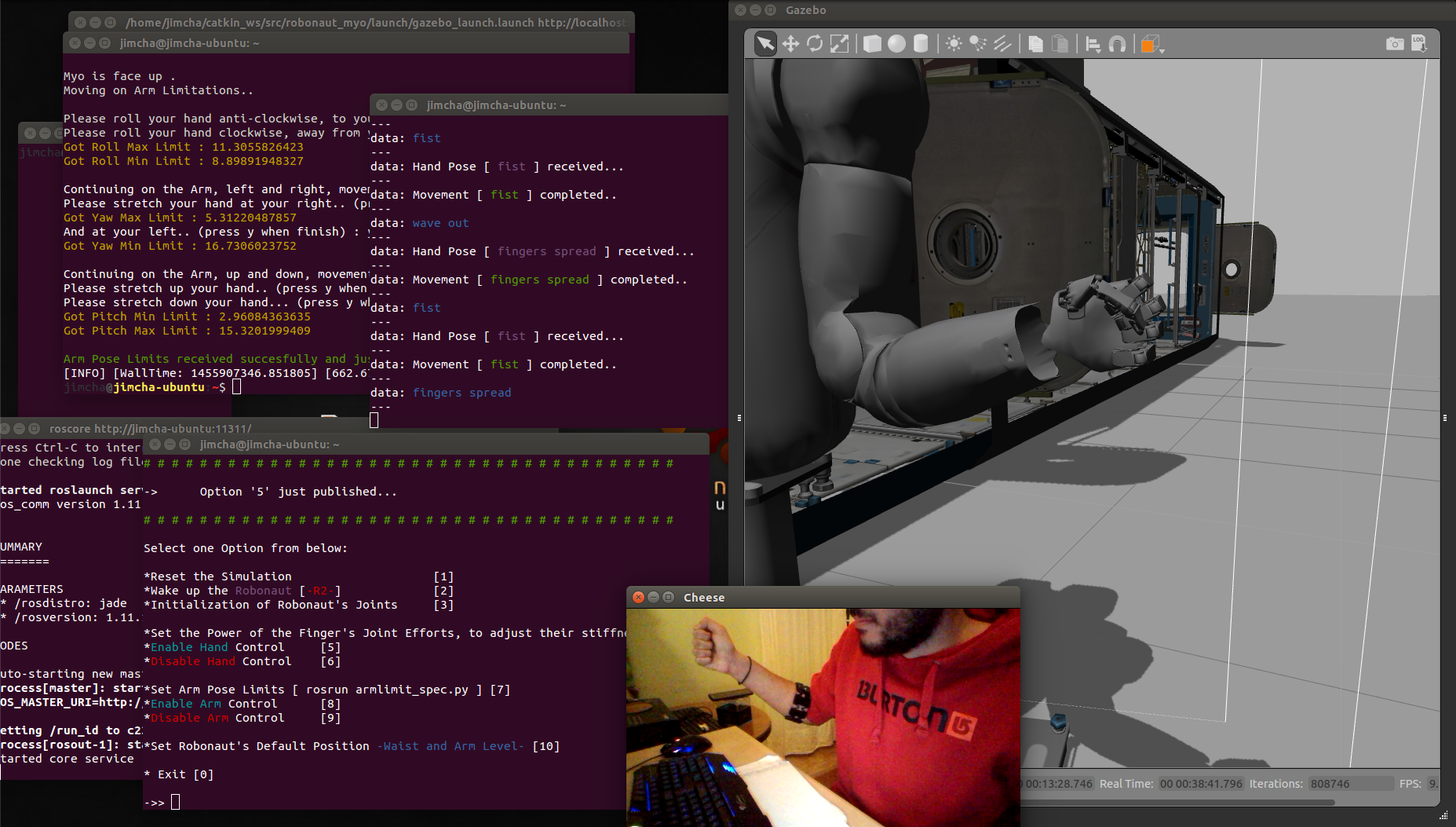
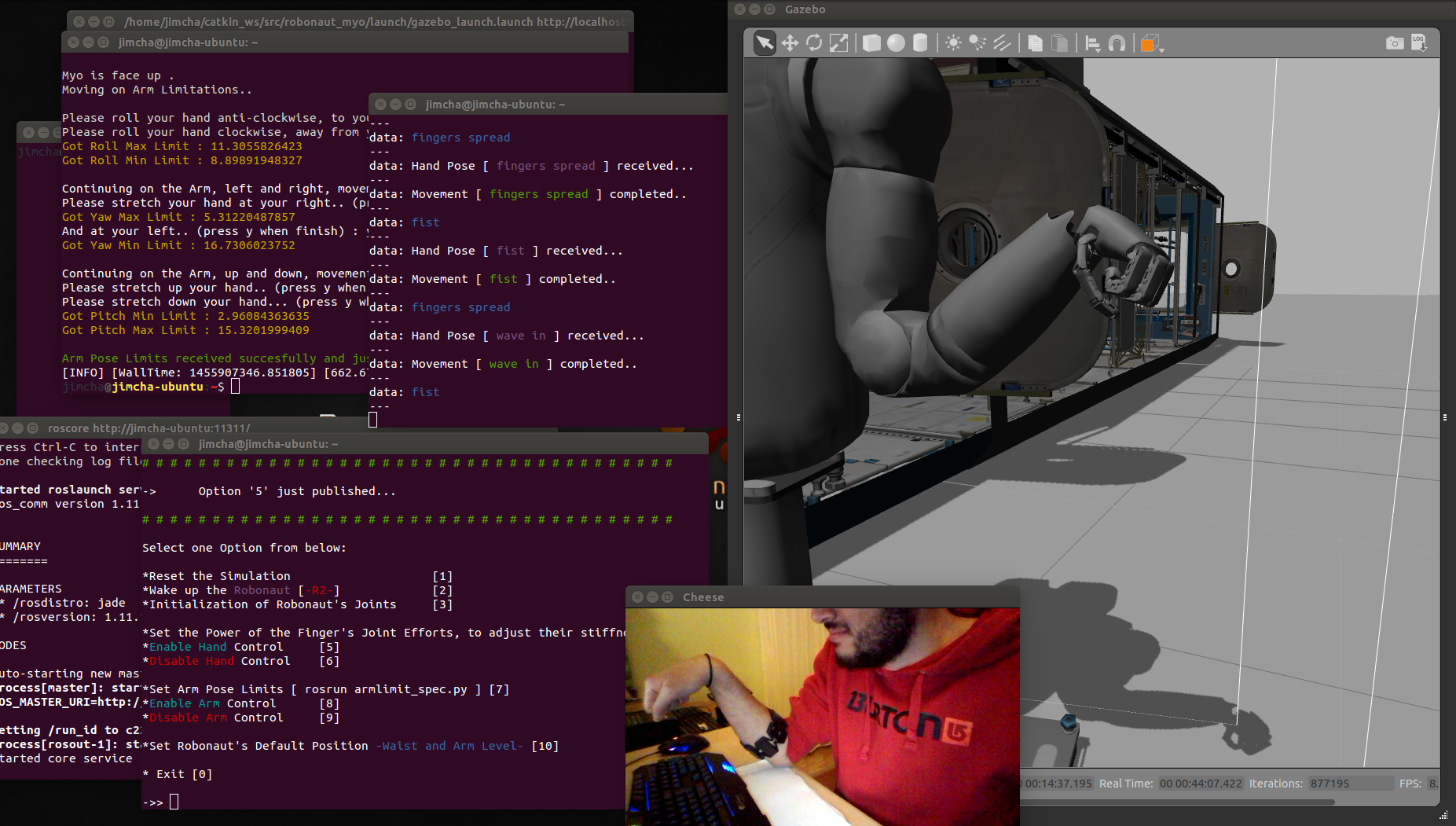
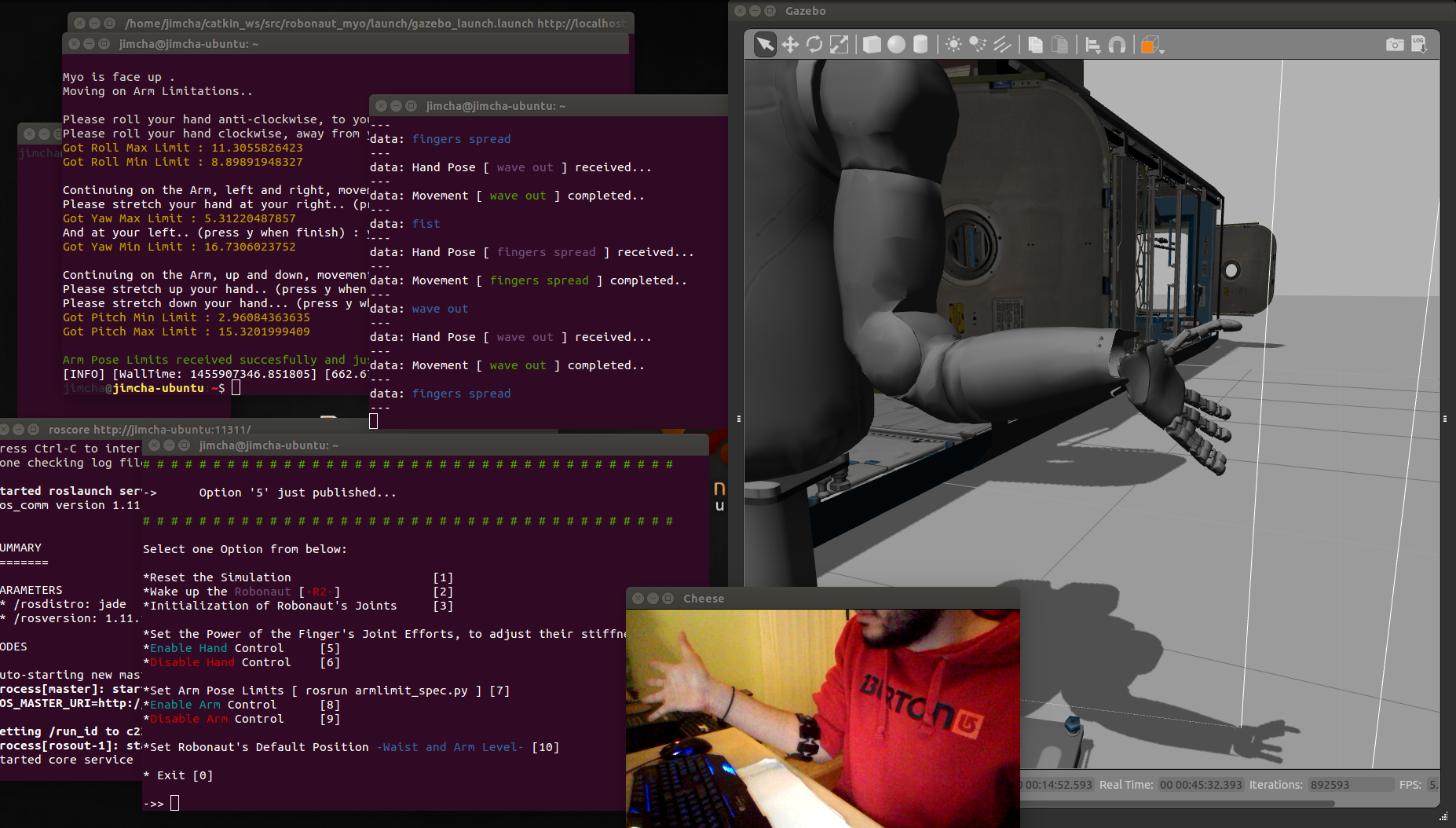
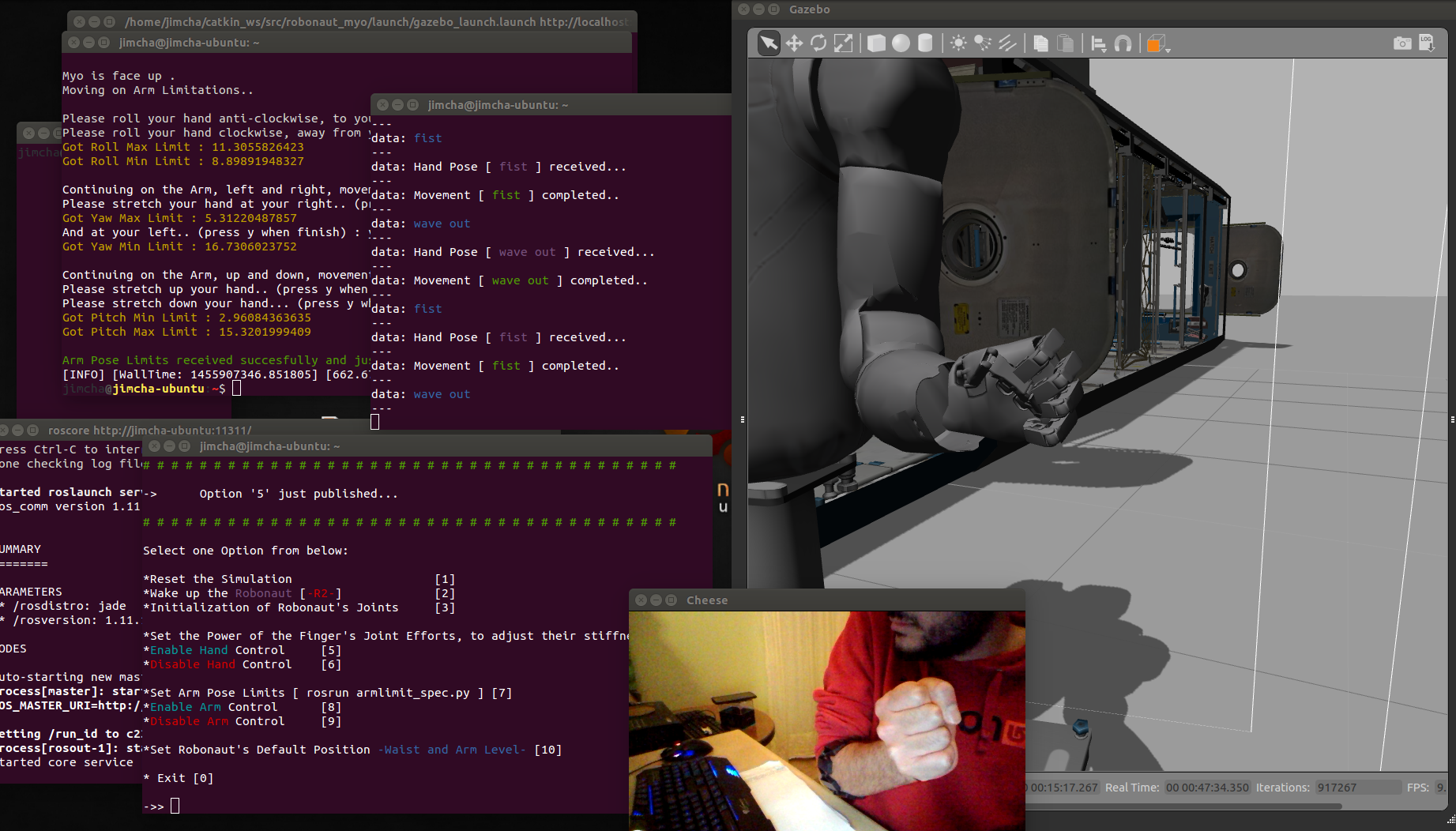
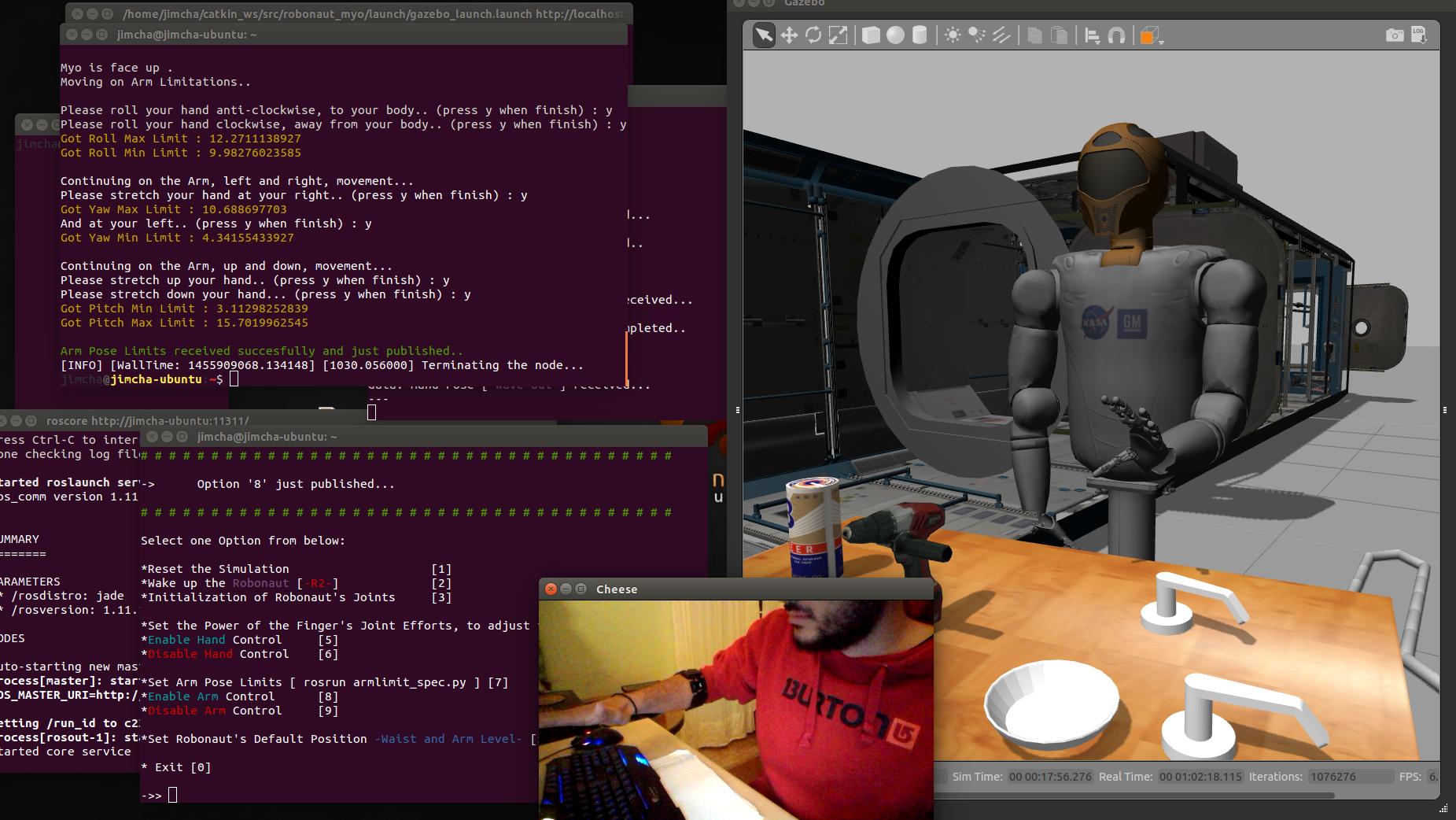
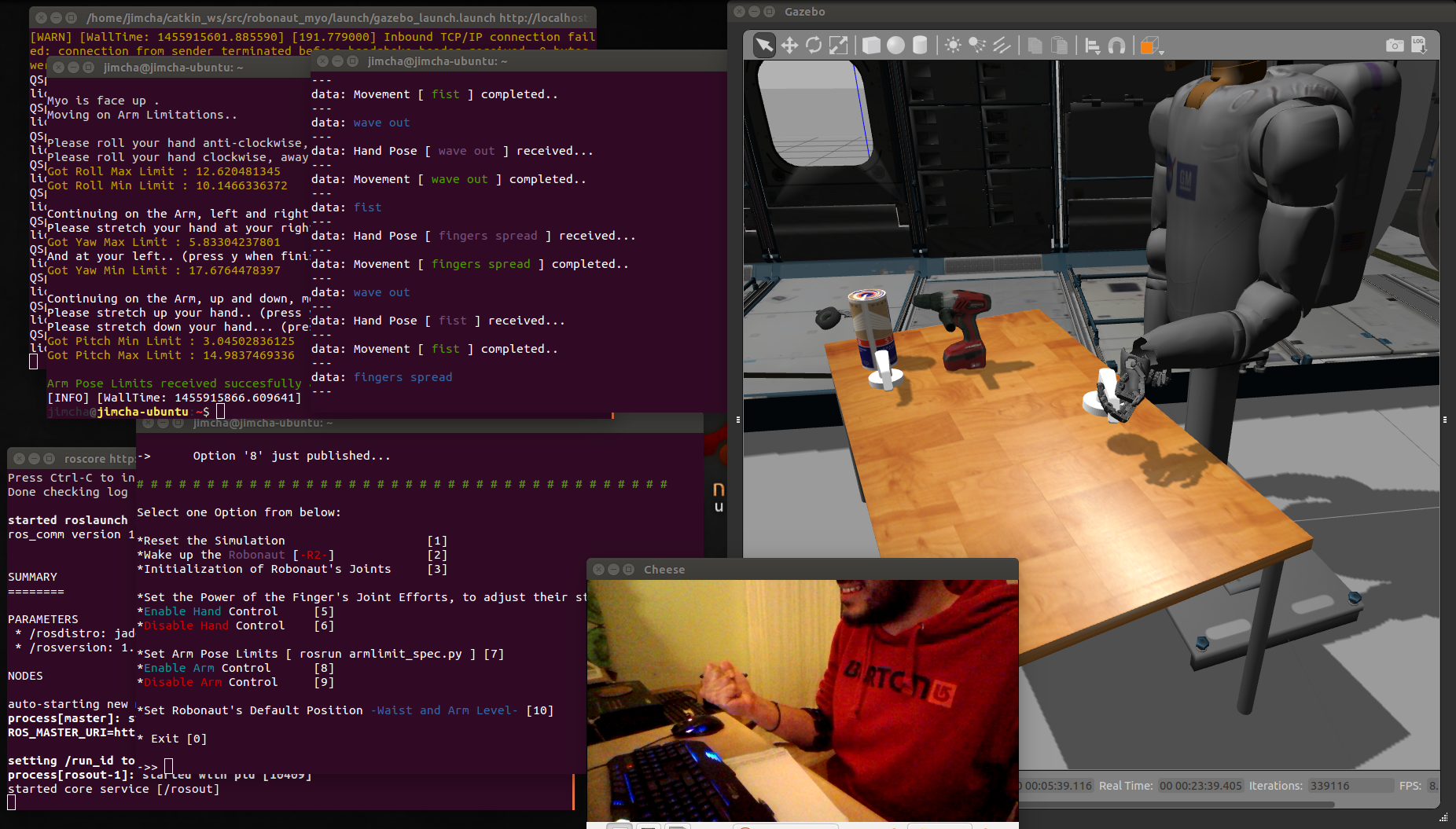

Download the .zip with the Simulation Screenshots from here. [.zip]
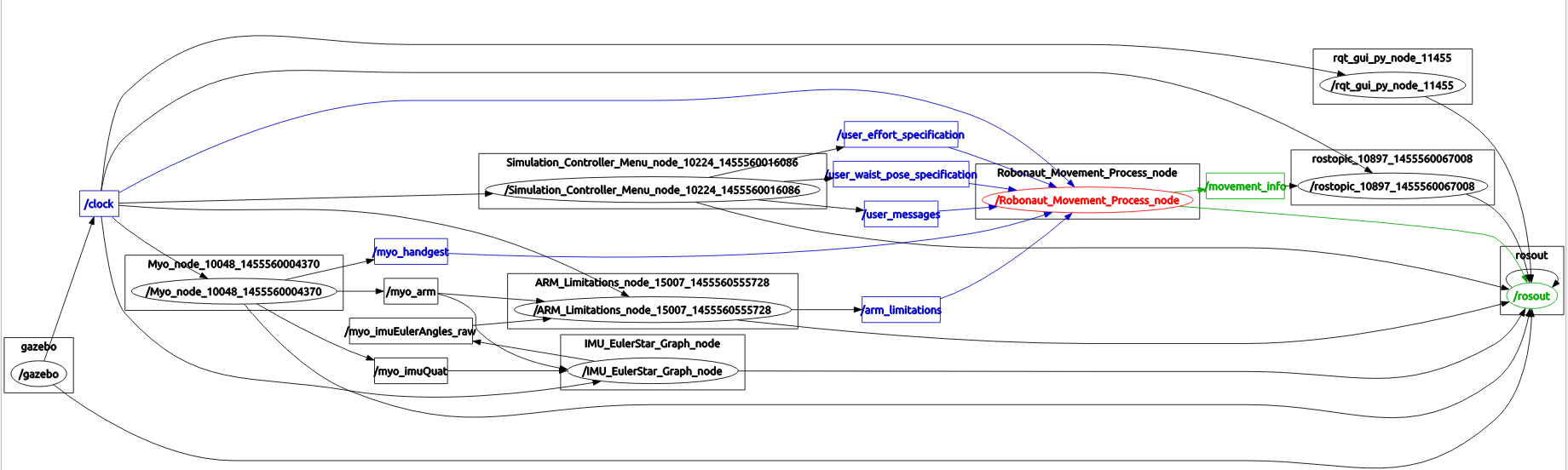
The Analytical report about the ROS package structure and implemetation and also extra details about my project, can be found here.
[English PDF] [Greek PDF]
[English PDF] [Greek PDF]
Download or Clone [ Github repository available soon ] the robonaut_myo ROS Package. Installation and ROS Nodes-Topics Setup details are included in the Detailed report, from above.
[Download Package .zip]
(The above .zip contains the ROS Packages "robonaut_myo" and "gazebo_ros" and the Robonaut2_st Gazebo model.)
[Download Package .zip]
(The above .zip contains the ROS Packages "robonaut_myo" and "gazebo_ros" and the Robonaut2_st Gazebo model.)
